异步计算
文档摘要
异步计算 :label: 今天的计算机是高度并行的系统,由多个CPU核、多个GPU、多个处理单元组成。通常每个CPU核有多个线程,每个设备通常有多个GPU,每个GPU有多个处理单元。总之,我们可以同时处理许多不同的事情,并且通常是在不同的设备上。不幸的是,Python并不善于编写并行和异步代码,至少在没有额外帮助的情况下不是好选择。归根结底,Python是单线程的,将来也是不太可能改变的。因此在诸多的深度学习框架中,MXNet和TensorFlow之类则采用了一种异步编程(asynchronous programming)模型来提高性能,而PyTorch则使用了Python自己的调度器来实现不同的性能权衡。对PyTorch来说GPU操作在默认情况下是异步的。
异步计算
🏷sec_async
今天的计算机是高度并行的系统,由多个CPU核、多个GPU、多个处理单元组成。通常每个CPU核有多个线程,每个设备通常有多个GPU,每个GPU有多个处理单元。总之,我们可以同时处理许多不同的事情,并且通常是在不同的设备上。不幸的是,Python并不善于编写并行和异步代码,至少在没有额外帮助的情况下不是好选择。归根结底,Python是单线程的,将来也是不太可能改变的。因此在诸多的深度学习框架中,MXNet和TensorFlow之类则采用了一种异步编程(asynchronous programming)模型来提高性能,而PyTorch则使用了Python自己的调度器来实现不同的性能权衡。对PyTorch来说GPU操作在默认情况下是异步的。当调用一个使用GPU的函数时,操作会排队到特定的设备上,但不一定要等到以后才执行。这允许我们并行执行更多的计算,包括在CPU或其他GPU上的操作。
因此,了解异步编程是如何工作的,通过主动地减少计算需求和相互依赖,有助于我们开发更高效的程序。这能够减少内存开销并提高处理器利用率。
from d2l import mxnet as d2l import numpy, os, subprocess from mxnet import autograd, gluon, np, npx from mxnet.gluon import nn npx.set_np()
#@tab pytorch from d2l import torch as d2l import numpy, os, subprocess import torch from torch import nn
#@tab paddle from d2l import paddle as d2l import numpy, os, subprocess import warnings warnings.filterwarnings("ignore") import paddle from paddle import nn d2l.try_gpu()
通过后端异步处理
:begin_tab:mxnet
作为热身,考虑一个简单问题:生成一个随机矩阵并将其相乘。让我们在NumPy和mxnet.np中都这样做,看看有什么不同。
:end_tab:
:begin_tab:pytorch
作为热身,考虑一个简单问题:生成一个随机矩阵并将其相乘。让我们在NumPy和PyTorch张量中都这样做,看看它们的区别。请注意,PyTorch的tensor是在GPU上定义的。
:end_tab:
:begin_tab:paddle
作为热身,考虑一个简单问题:我们要生成一个随机矩阵并将其相乘。让我们在NumPy和飞桨张量中都这样做,看看它们的区别。请注意,飞桨的tensor是在GPU上定义的。
:end_tab:
with d2l.Benchmark('numpy'): for _ in range(10): a = numpy.random.normal(size=(1000, 1000)) b = numpy.dot(a, a) with d2l.Benchmark('mxnet.np'): for _ in range(10): a = np.random.normal(size=(1000, 1000)) b = np.dot(a, a)
#@tab pytorch # GPU计算热身 device = d2l.try_gpu() a = torch.randn(size=(1000, 1000), device=device) b = torch.mm(a, a) with d2l.Benchmark('numpy'): for _ in range(10): a = numpy.random.normal(size=(1000, 1000)) b = numpy.dot(a, a) with d2l.Benchmark('torch'): for _ in range(10): a = torch.randn(size=(1000, 1000), device=device) b = torch.mm(a, a)
#@tab paddle # GPU计算热身 a = paddle.randn(shape=(1000, 1000)) b = paddle.mm(a, a) with d2l.Benchmark('numpy'): for _ in range(10): a = numpy.random.normal(size=(1000, 1000)) b = numpy.dot(a, a) with d2l.Benchmark('paddle'): for _ in range(10): a = paddle.randn(shape=(1000, 1000)) b = paddle.mm(a, a)
:begin_tab:mxnet
通过MXNet的基准输出比较快了几个数量级。由于两者都在同一处理器上执行,因此一定有其他原因。强制MXNet在返回之前完成所有后端计算,这种强制说明了之前发生的情况:计算是由后端执行,而前端将控制权返回给了Python。
:end_tab:
:begin_tab:pytorch
通过PyTorch的基准输出比较快了几个数量级。NumPy点积是在CPU上执行的,而PyTorch矩阵乘法是在GPU上执行的,后者的速度要快得多。但巨大的时间差距表明一定还有其他原因。默认情况下,GPU操作在PyTorch中是异步的。强制PyTorch在返回之前完成所有计算,这种强制说明了之前发生的情况:计算是由后端执行,而前端将控制权返回给了Python。
:end_tab:
:begin_tab:paddle
通过飞桨的基准输出比较快了几个数量级。NumPy点积是在CPU上执行的,而飞桨矩阵乘法是在GPU上执行的,后者的速度要快得多。但巨大的时间差距表明一定还有其他原因。默认情况下,GPU操作在飞桨中是异步的。强制飞桨在返回之前完成所有计算,这种强制说明了之前发生的情况:计算是由后端执行,而前端将控制权返回给了Python。
:end_tab:
with d2l.Benchmark(): for _ in range(10): a = np.random.normal(size=(1000, 1000)) b = np.dot(a, a) npx.waitall()
#@tab pytorch with d2l.Benchmark(): for _ in range(10): a = torch.randn(size=(1000, 1000), device=device) b = torch.mm(a, a) torch.cuda.synchronize(device)
#@tab paddle with d2l.Benchmark(): for _ in range(10): a = paddle.randn(shape=(1000, 1000)) b = paddle.mm(a, a) paddle.device.cuda.synchronize()
:begin_tab:mxnet
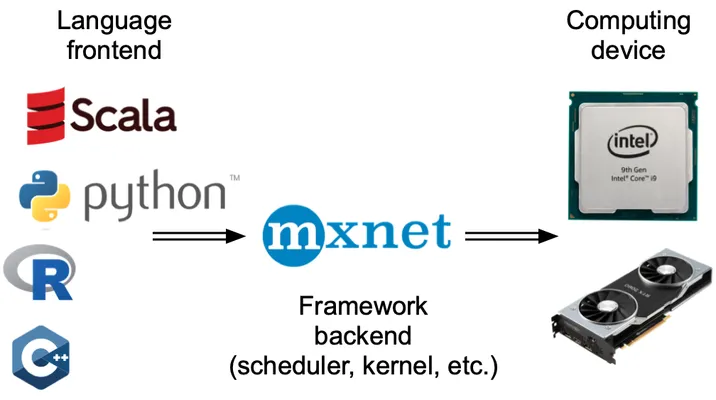
广义上说,MXNet有一个用于与用户直接交互的前端(例如通过Python),还有一个由系统用来执行计算的后端。如 :numref:fig_frontends所示,用户可以用各种前端语言编写MXNet程序,如Python、R、Scala和C++。不管使用的前端编程语言是什么,MXNet程序的执行主要发生在C++实现的后端。由前端语言发出的操作被传递到后端执行。后端管理自己的线程,这些线程不断收集和执行排队的任务。请注意,要使其工作,后端必须能够跟踪计算图中各个步骤之间的依赖关系。因此,不可能并行化相互依赖的操作。
:end_tab:
:begin_tab:pytorch
广义上说,PyTorch有一个用于与用户直接交互的前端(例如通过Python),还有一个由系统用来执行计算的后端。如 :numref:fig_frontends所示,用户可以用各种前端语言编写PyTorch程序,如Python和C++。不管使用的前端编程语言是什么,PyTorch程序的执行主要发生在C++实现的后端。由前端语言发出的操作被传递到后端执行。后端管理自己的线程,这些线程不断收集和执行排队的任务。请注意,要使其工作,后端必须能够跟踪计算图中各个步骤之间的依赖关系。因此,不可能并行化相互依赖的操作。
:end_tab:
:begin_tab:paddle
广义上说,飞桨有一个用于与用户直接交互的前端(例如通过Python),还有一个由系统用来执行计算的后端。如 :numref:fig_frontends所示,用户可以用各种前端语言编写Python程序,如Python和C++。不管使用的前端编程语言是什么,飞桨程序的执行主要发生在C++实现的后端。由前端语言发出的操作被传递到后端执行。后端管理自己的线程,这些线程不断收集和执行排队的任务。请注意,要使其工作,后端必须能够跟踪计算图中各个步骤之间的依赖关系。因此,不可能并行化相互依赖的操作。
:end_tab:
:width:300px
🏷fig_frontends
接下来看看另一个简单例子,以便更好地理解依赖关系图。
x = np.ones((1, 2)) y = np.ones((1, 2)) z = x * y + 2 z
#@tab pytorch x = torch.ones((1, 2), device=device) y = torch.ones((1, 2), device=device) z = x * y + 2 z
#@tab paddle x = paddle.ones((1, 2)) y = paddle.ones((1, 2)) z = x * y + 2 z

🏷fig_asyncgraph
上面的代码片段在 :numref:fig_asyncgraph中进行了说明。每当Python前端线程执行前三条语句中的一条语句时,它只是将任务返回到后端队列。当最后一个语句的结果需要被打印出来时,Python前端线程将等待C++后端线程完成变量z的结果计算。这种设计的一个好处是Python前端线程不需要执行实际的计算。因此,不管Python的性能如何,对程序的整体性能几乎没有影响。 :numref:fig_threading演示了前端和后端如何交互。

🏷fig_threading
障碍器与阻塞器
:begin_tab:mxnet
有许多操作用于强制Python等待完成:
- 最明显的是,
npx.waitall()不考虑计算指令的发出时间,等待直到所有计算完成。除非绝对必要,否则在实践中使用此运算符不是个好主意,因为它可能会导致较差的性能; - 如果只想等待一个特定的变量可用,我们可以调用
z.wait_to_read()。在这种情况下,MXNet阻止程序返回Python,直到计算出变量z为止。z之后的其他计算才可能很好地继续。
接下来看看这在实践中是如何运作的。
:end_tab:
with d2l.Benchmark('waitall'): b = np.dot(a, a) npx.waitall() with d2l.Benchmark('wait_to_read'): b = np.dot(a, a) b.wait_to_read()
:begin_tab:mxnet
两个操作的完成时间大致相同。除了显式地阻塞操作之外,建议注意隐式的阻塞器。打印变量就是一个阻塞器,因为其要求变量可用。最后,通过z.asnumpy()转换为NumPy类型的变量和通过z.item()转换为标量也是阻塞器。因为NumPy中没有异步的概念,因此它需要像print函数(等待变量可用)一样访问这些值。
频繁地将少量数据从MXNet的作用域复制到NumPy,可能会破坏原本高效代码的性能,因为每一个这样的操作都需要使用计算图来求得所有的中间结果,从而获得相关项,然后才能做其他事情。
:end_tab:
with d2l.Benchmark('numpy conversion'): b = np.dot(a, a) b.asnumpy() with d2l.Benchmark('scalar conversion'): b = np.dot(a, a) b.sum().item()
改进计算
:begin_tab:mxnet
在重度多线程的系统中(即使普通笔记本电脑也有4个或更多线程,然而在多插槽服务器上这个数字可能超过256),调度操作的开销可能会变得非常大。这也是极度希望计算和调度是异步和并行的原因。为了说明这样做的好处,让我们看看按顺序(同步执行)或异步执行多次将变量递增1会发生什么情况。这里通过在每个加法之间插入wait_to_read障碍器来模拟同步执行。
:end_tab:
with d2l.Benchmark('synchronous'): for _ in range(10000): y = x + 1 y.wait_to_read() with d2l.Benchmark('asynchronous'): for _ in range(10000): y = x + 1 npx.waitall()
Python前端线程和C++后端线程之间的简化交互可以概括如下:
- 前端命令后端将计算任务
y = x + 1插入队列; - 然后后端从队列接收计算任务并执行;
- 然后后端将计算结果返回到前端。
假设这三个阶段的持续时间分别为t_1, t_2, t_3。如果不使用异步编程,执行10000次计算所需的总时间约为10000 (t_1+ t_2 + t_3)。如果使用异步编程,因为前端不必等待后端为每个循环返回计算结果,执行10000次计算所花费的总时间可以减少到t_1 + 10000 t_2 + t_3(假设10000 t_2 > 9999t_1)。
小结
- 深度学习框架可以将Python前端的控制与后端的执行解耦,使得命令可以快速地异步插入后端、并行执行。
- 异步产生了一个相当灵活的前端,但请注意:过度填充任务队列可能会导致内存消耗过多。建议对每个小批量进行同步,以保持前端和后端大致同步。
- 芯片供应商提供了复杂的性能分析工具,以获得对深度学习效率更精确的洞察。
:begin_tab:mxnet
- 将MXNet管理的内存转换到Python将迫使后端等待特定变量就绪,
print、asnumpy和item等函数也具有这个效果。请注意,错误地使用同步会破坏程序性能。
:end_tab:
练习
:begin_tab:mxnet
- 上面提到使用异步计算可以将执行10000次计算所需的总时间减少到t_1 + 10000 t_2 + t_3。为什么要假设这里是10000 t_2 > 9999 t_1?
- 测量
waitall和wait_to_read之间的差值。提示:执行多条指令并同步以获得中间结果。
:end_tab:
:begin_tab:pytorch
- 在CPU上,对本节中相同的矩阵乘法操作进行基准测试,仍然可以通过后端观察异步吗?
:end_tab:
:begin_tab:paddle
- 在CPU上,对本节中相同的矩阵乘法操作进行基准测试。你仍然可以通过后端观察异步吗?
:end_tab:
:begin_tab:mxnet
Discussions
:end_tab:
:begin_tab:pytorch
Discussions
:end_tab:
:begin_tab:paddle
Discussions
:end_tab: