22.3碰撞检测
文档摘要
## 22.3 碰撞检测 在Physx的设定,刚体(PxRigidBody)只是一个质点,它拥有质量,但是具体的表现是通过形状(PxShape)来约束的。 同一个刚体,可以附加一个正方体的Shape,也可以附加一个球体的Shape,不同形状的Shape有着不同的物理检测的结果。 对同一个形状的Shape,可以设置不同的标志(PxShapeFlag), 表示刚体将在物理模拟中参与碰撞, 则表示只作为Trigger,不参与碰撞。 其实在上一节的两个实例,就已经是参与碰撞的。 这是因为创建Shape默认是指定了 ,即参与碰撞。 但是之前并没有添加回调,下面就来将回调加上。 本小节通过小球撞墙的例子,来看着两个标志的表现,以及测试事件回调。 事件回调 Physx提供了事件回调接口 。
22.3 碰撞检测
CLion项目文件位于 samples\physx\physx_collision_detection
在Physx的设定,刚体(PxRigidBody)只是一个质点,它拥有质量,但是具体的表现是通过形状(PxShape)来约束的。
同一个刚体,可以附加一个正方体的Shape,也可以附加一个球体的Shape,不同形状的Shape有着不同的物理检测的结果。
对同一个形状的Shape,可以设置不同的标志(PxShapeFlag),PxShapeFlag::eSIMULATION_SHAPE表示刚体将在物理模拟中参与碰撞,PxShapeFlag::eTRIGGER_SHAPE则表示只作为Trigger,不参与碰撞。
其实在上一节的两个实例,就已经是参与碰撞的。
这是因为创建Shape默认是指定了PxShapeFlag::eSIMULATION_SHAPE,即参与碰撞。
//file:physx/include/PxPhysics.h line:377 //@} /** @name Shapes */ //@{ /** \brief Creates a shape which may be attached to multiple actors The shape will be created with a reference count of 1. \param [in] geometry The geometry for the shape \param [in] material The material for the shape \param [in] isExclusive Whether this shape is exclusive to a single actor or maybe be shared \param [in] shapeFlags The PxShapeFlags to be set Shared shapes are not mutable when they are attached to an actor @see PxShape */ PX_FORCE_INLINE PxShape* createShape( const PxGeometry& geometry, const PxMaterial& material, bool isExclusive = false, PxShapeFlags shapeFlags = PxShapeFlag::eVISUALIZATION | PxShapeFlag::eSCENE_QUERY_SHAPE | PxShapeFlag::eSIMULATION_SHAPE) { PxMaterial* materialPtr = const_cast<PxMaterial*>(&material); return createShape(geometry, &materialPtr, 1, isExclusive, shapeFlags); }
但是之前并没有添加回调,下面就来将回调加上。
本小节通过小球撞墙的例子,来看着两个标志的表现,以及测试事件回调。
1. 事件回调
Physx提供了事件回调接口PxSimulationEventCallback。
例子里继承并重写了接口,输出Log,用于观察碰撞检测。
//file:example/simulation_event_callback.h line:14 //~en SimulationEventCallback is a PxSimulationEventCallback that is used to receive events from the PhysX SDK. //~zh SimulationEventCallback 是一个用于从 PhysX SDK 接收事件的 PxSimulationEventCallback。 class SimulationEventCallback: public PxSimulationEventCallback { public: void onConstraintBreak(PxConstraintInfo* constraints, PxU32 count) override { printf("onConstraintBreak\n"); } void onWake(PxActor** actors, PxU32 count) override { printf("onWake\n"); } void onSleep(PxActor** actors, PxU32 count) override { printf("onSleep\n"); } void onTrigger(PxTriggerPair* pairs, PxU32 count) override { printf("onTrigger: %d trigger pairs\n", count); while(count--) { const PxTriggerPair& current = *pairs++; if(current.status & PxPairFlag::eNOTIFY_TOUCH_FOUND) printf("Shape is entering trigger volume\n"); if(current.status & PxPairFlag::eNOTIFY_TOUCH_LOST) printf("Shape is leaving trigger volume\n"); } } void onAdvance(const PxRigidBody*const*, const PxTransform*, const PxU32) override { printf("onAdvance\n"); } void onContact(const PxContactPairHeader& pairHeader, const PxContactPair* pairs, PxU32 count) override { printf("onContact: %d pairs\n", count); } };
在创建Scene的时候,对SceneDesc指定了事件回调处理SimulationEventCallback的实例gSimulationEventCallback。
//file:example/main.cpp line:38 //~zh 设置在碰撞发生时,Physx需要做的事情 //~en Set the actions when collision occurs,Physx needs to do. static PxFilterFlags SimulationFilterShader(PxFilterObjectAttributes attributes0, PxFilterData filterData0,PxFilterObjectAttributes attributes1, PxFilterData filterData1,PxPairFlags& pairFlags, const void* constantBlock, PxU32 constantBlockSize) { pairFlags = PxPairFlag::eCONTACT_DEFAULT | PxPairFlag::eNOTIFY_TOUCH_FOUND; return PxFilterFlags(); } //~en Create Scene //~zh 创建Scene void CreateScene(){ PxSceneDesc sceneDesc(gPhysics->getTolerancesScale()); sceneDesc.gravity = PxVec3(0.0f, -0.98f, 0.0f); gDispatcher = PxDefaultCpuDispatcherCreate(2); sceneDesc.cpuDispatcher = gDispatcher; //~zh 指定事件回调 //~en Specify the event callback sceneDesc.simulationEventCallback = &gSimulationEventCallback; //~zh 设置在碰撞发生时,Physx需要做的事情 //~en Set the actions when collision occurs,Physx needs to do. sceneDesc.filterShader = SimulationFilterShader; gScene = gPhysics->createScene(sceneDesc); PxPvdSceneClient* pvdClient = gScene->getScenePvdClient(); if(pvdClient) { pvdClient->setScenePvdFlag(PxPvdSceneFlag::eTRANSMIT_CONSTRAINTS, true); pvdClient->setScenePvdFlag(PxPvdSceneFlag::eTRANSMIT_CONTACTS, true); pvdClient->setScenePvdFlag(PxPvdSceneFlag::eTRANSMIT_SCENEQUERIES, true); } }
由于物理引擎是特别消耗性能的,所以Physx默认是不处理碰撞检测回调的,所以还需要将碰撞检测回调的处理标志加上:
//~zh 设置在碰撞发生时,Physx需要做的事情 //~en Set the actions when collision occurs,Physx needs to do. sceneDesc.filterShader = SimulationFilterShader;
在函数SimulationFilterShader里,指定了PxPairFlag::eNOTIFY_TOUCH_FOUND,这个标志表示在碰撞发生时,Physx需要处理回调函数。
至此,事件回调就设置好了。
2. 检测碰撞
创建墙壁与小球。
//file:example/main.cpp line:71 //~en Create wall,add to scene. //~zh 创建墙,并添加到场景中 void CreateWall(){ //~en Create RigidBody,pos is (0,10,0) //~zh 创建刚体,坐标是 (0,10,0) PxRigidStatic* body = gPhysics->createRigidStatic(PxTransform(PxVec3(0, 10, 0))); //~en Create Physx Material. //~zh 创建物理材质 PxMaterial* wallMaterial = gPhysics->createMaterial(1.0f, 1.0f, 0.0f); //~en Create wall shape. //~zh 创建墙体形状 const PxVec3 halfExtent(0.1f, 10.0f, 10.0f); PxShape* shape = gPhysics->createShape(PxBoxGeometry(halfExtent), *wallMaterial); //~en Add shape to body. //~zh 设置刚体形状,长方体的一面墙。 body->attachShape(*shape); shape->release(); //~en Add body to scene. //~zh 将刚体添加到场景中 gScene->addActor(*body); } //~zh 创建小球,并添加到场景中 //~en Create ball,add to scene. void CreateBall(){ //~en Create RigidBody,pos is (10,0,0) //~zh 创建刚体,坐标是 (10,0,0) PxRigidDynamic* body = gPhysics->createRigidDynamic(PxTransform(PxVec3(10, 5, 0))); body->setLinearVelocity(PxVec3(-14.0f, 0.0f, 0.0f)); //~en Create Physx Material. //~zh 创建小球的物理材质 PxMaterial* ballMaterial = gPhysics->createMaterial(0.5f, 0.5f, 1.0f); //~en Set rigid body sharp //~zh 设置刚体形状,一个球。 float radius = 0.5f; PxShape* shape = gPhysics->createShape(PxSphereGeometry(radius), *ballMaterial); body->attachShape(*shape); shape->release(); //~en calculate mass,mass = volume * density //~zh 根据体积、密度计算质量 PxRigidBodyExt::updateMassAndInertia(*body, 1.0f); gScene->addActor(*body); }
和上一节的代码没有太大差别,只是创建地板换成了创建墙壁,就不多介绍了。
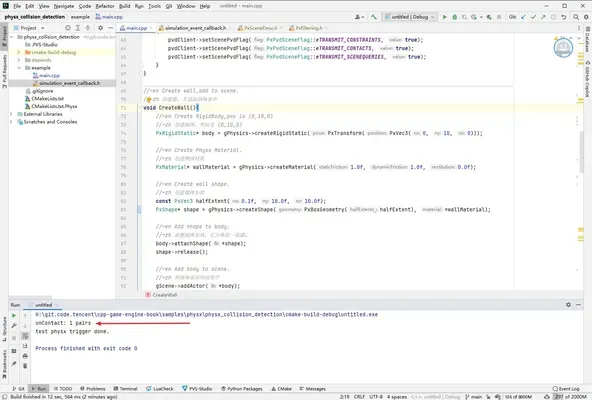
输出了碰撞的Log。

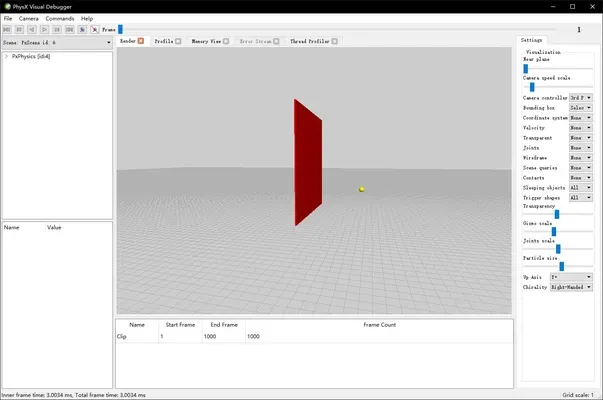
在PVD中可以看到发生了碰撞,小球被墙壁反弹。
3. 作为Trigger
将墙作为Trigger,不参与碰撞。
//file:example/main.cpp line:71 //~en Create wall,add to scene. //~zh 创建墙,并添加到场景中 void CreateWall(){ ...... //~en Create wall shape. //~zh 创建墙体形状 const PxVec3 halfExtent(0.1f, 10.0f, 10.0f); // PxShape* shape = gPhysics->createShape(PxBoxGeometry(halfExtent), *wallMaterial); PxShape* shape = gPhysics->createShape(PxBoxGeometry(halfExtent), *wallMaterial,false,PxShapeFlag::eVISUALIZATION | PxShapeFlag::eTRIGGER_SHAPE); ...... }
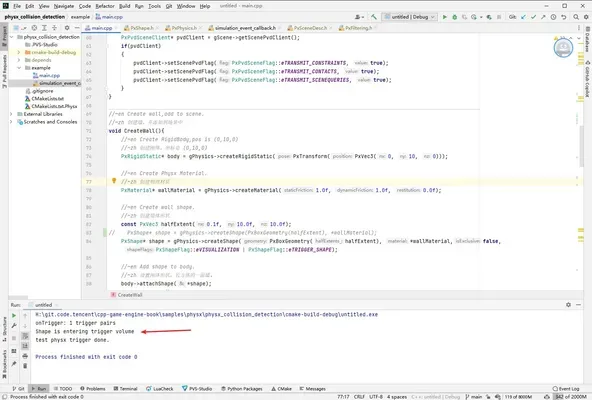
输出了Trigger的Log。

在PVD中可以看到没有碰撞,小球直接穿过了墙壁。