Chapter8.Nesterov
文档摘要
第8章 Nesterov 加速算法   Nesterov加速方法的基本迭代形式为: $$ \begin{aligned} v{t} &=\mu{t-1} v{t-1}-\epsilon{t-1} \nabla g\left(\theta{t-1}+\mu{t-1} v{t-1}\right) \\ \theta{t} &=\theta{t-1}+v{t} \end{aligned} $$   和动量方法的区别在于二者用到了不同点的梯度,动量方法采用的是上一步 $\theta{t-1}$ 的梯度方向,而Nesterov加速方法则是从 $\theta{t-1}$ 朝着 $v{t-1}$ 往前一步。
第8章 Nesterov 加速算法
Nesterov加速方法的基本迭代形式为:
和动量方法的区别在于二者用到了不同点的梯度,动量方法采用的是上一步 \theta_{t-1} 的梯度方向,而Nesterov加速方法则是从 \theta_{t-1} 朝着 v_{t-1} 往前一步。 一种解释是,反正要朝着 v_{t-1} 方向走,不如先利用了这个信息。 接下来推导出第二种等价形式:
然后引入中间变量 y_{t-1} ,使得它满足
然后得到第二种等价形式
这可以理解为先进行梯度步,然后再进行加速步,这两种形式是完全等价的。
重球法
首先我们从梯度下降法出发:
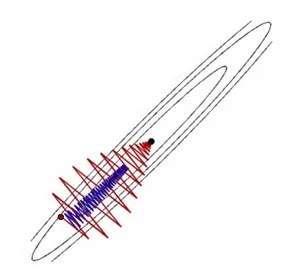
由于过度使用了局部的梯度信息,可能会导致震荡,导致迭代速度变慢:
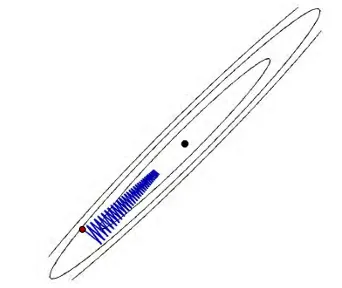
想象一个球从山上滚下来,刚开始速度为0,就会滚得磕磕碰碰(震荡)。但是经过一段时间动量(Momentum)的累加,震荡就会减少,径直往山下滚。
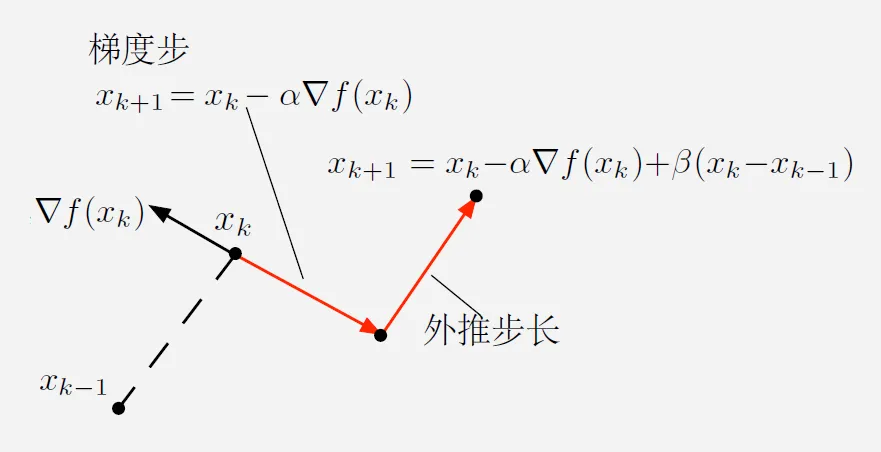
因此我们引入第一种加速方法:重球法,其迭代形式为:
其中 \beta_{k}(x_{k}-x_{k-1}) 为动量项,是为了防止由于局部驱动(即梯度方向)引起的振荡。
重球法的收敛性
这里我们简单的介绍一下其收敛性:考虑m-强凸且L-Lipshitz光滑的函数,取\kappa=\frac{L}{m}我们有如下结论:
当取最优步长时,梯度下降法具有线性收敛速度,即
而取最优步长时的重球法具有超线性收敛速度,即
格式上看起来很像,但是根号的区别导致了收敛速度的巨大差异。
为了保证\|x_k-x^*\|_2\leq\epsilon \|x_0-x^*\|
迭代次数只需要:
这就意味着当\kappa很大时,重球法的收敛速度远远快于梯度下降法。例如\kappa=100时,重球法比梯度下降法快了10倍。
我们可以将其改写为下降方向的形式:
其中\beta_k为动量项通常取为0.9,\alpha_k为步长可以用线搜索来选择。
Nesterov加速算法
1983年,Yurii Nesterov提出了一种新的加速算法,称为Nesterov加速算法。他改写了重球法的迭代格式:
对比重球法,Nesterov加速算法的不同之处在于,
它在计算梯度时,先进行了一个预测,然后再进行梯度下降。这种预测的好处在于,它可以更好地估计下一步的梯度,从而更好地指导下一步的迭代。同时我们也无需再保证强凸性,Nesterov加速算法也能保证收敛性,只需要保证函数是L-Lipshitz光滑的即可。
对于Nesterov加速算法的参数选择,通常取\alpha_k=\frac{2}{L},\beta_k=\frac{k-2}{k+1}。
Nesterov加速算法的收敛性
考虑L-Lipshitz光滑的函数,我们有如下结论:
取最优步长时梯度下降法的收敛速度:
Nesterov加速算法的收敛速度:
为了保证f(x_k)-f(x^*)\leq\epsilon,我们只需要保证迭代次数k满足:
这也就意味着如果选择\epsilon很小时,Nesterov加速法的收敛速度远远快于梯度下降法。如果\epsilon=10^{-2},Nesterov加速法比梯度下降法快了10倍。