6.6简单去噪[ddpm-unet]
文档摘要
comments: true title: 一种简单的去噪方法 sora 前言 随着 的横空出世,文生视频喧嚣一时,究其技术源头仍然是隐扩散去噪模型。 本文希望从手写数字图像去噪代码,来了解以下的知识。 小批量数据添加噪声 自建简单的UNet编解码器 基本的训练流程 代码 基本函数库的导入 数据集的加载 前向扩散 加噪声对应前向扩散,具体的代码的逻辑: 利用 根据图像的形状生成符合高斯分布的噪声。 是长度为批量大小,数值范围为$0\sim1$的均匀分布数据。为什么要这样呢?因为我们要对数据加上不同强度的噪声。 将amount的形状设置为 ,第一个维度为 ,每张图都对应一个噪声程度,其余的维度均为$1$便于与每张原始图像在相加的过程中进行广播。
comments: true title: 一种简单的去噪方法

前言
随着sora的横空出世,文生视频喧嚣一时,究其技术源头仍然是隐扩散去噪模型。
本文希望从手写数字图像去噪代码,来了解以下的知识。
- 小批量数据添加噪声
- 自建简单的UNet编解码器
- 基本的训练流程
代码
基本函数库的导入
import torch import pandas as pd from matplotlib import pyplot as plt
数据集的加载
class MnistDataset: def __init__(self, data_path, test=False): if not test: # 根据数据集的真实情况编写代码 self.data = pd.read_csv(data_path).drop("label", axis=1) else: self.data = pd.read_csv(data_path) def __len__(self): return len(self.data) def __getitem__(self, index): item = self.data.iloc[index, :] img = item.to_numpy().reshape(1, 28, 28) / 255 img = torch.tensor(img) return img, img # 第一个img用于加噪声,第二个img用于当作标签。
前向扩散
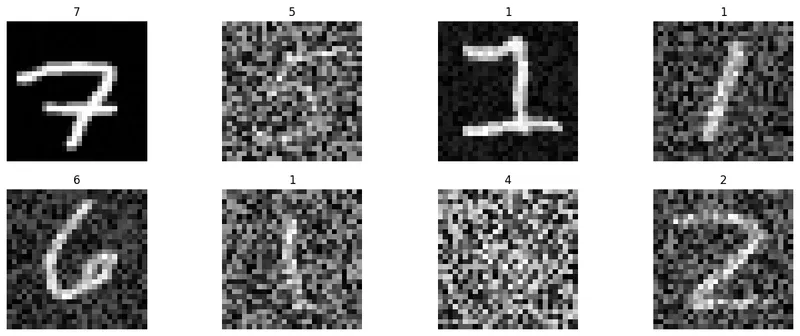
def corrupt(image, amount): # image: 将要进行加噪声的图像数据 # amount: 噪声强度的大小组成的张量 noise = torch.rand_like(image) amount = torch.tensor(amount).reshape(-1, 1, 1, 1) return image * (1 - amount) + noise * amount
加噪声对应前向扩散,具体的代码的逻辑:
- 利用
torch.rand_like(image)根据图像的形状生成符合高斯分布的噪声。 amount是长度为批量大小,数值范围为0\sim1的均匀分布数据。为什么要这样呢?因为我们要对数据加上不同强度的噪声。- 将amount的形状设置为
(batch size, 1, 1, 1),第一个维度为batch size,每张图都对应一个噪声程度,其余的维度均为1便于与每张原始图像在相加的过程中进行广播。 - 对图像加入噪声的方式是,保留一部分原始图像,再加入对应强度的噪声。
简单的UNet
class SimpleUNet(nn.Module): def __init__(self): super().__init__() self.downConv2d = nn.Sequential( # ! nn.Conv2d(1, 32, 5, padding=2, has_bias=True), nn.Conv2d(32, 64, 5, padding=2, has_bias=True), nn.Conv2d(64, 64, 5, padding=2, has_bias=True), ) self.upConv2d = nn.Sequential( nn.Conv2d(64, 64, 5, padding=2, has_bias=True), nn.Conv2d(64, 32, 5, padding=2, has_bias=True), nn.Conv2d(32, 1, 5, padding=2, has_bias=True), ) self.relu = nn.ReLU() self.downscale = nn.MaxPool2d(2, 2) # ! self.upscale = nn.Upsample(scale_factor=2.0) def forward(self, x): stack = [] for index, layer in enumerate(self.downConv2d): x = self.relu(layer(x)) if index < 2: stack.append(x) x = self.downscale(x) for index, layer in enumerate(self.upConv2d): if index > 0: x = self.upscale(x) x += stack.pop() x = self.relu(layer(x)) return x
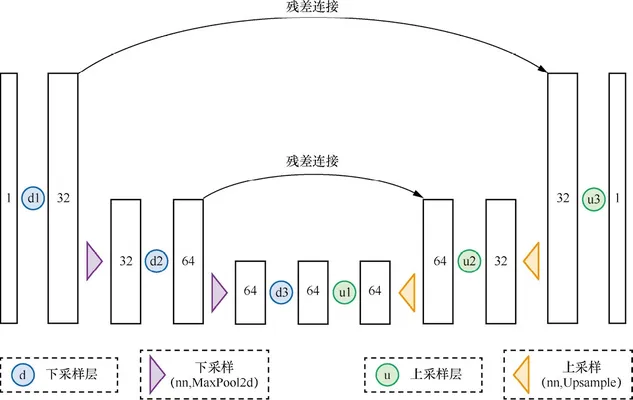
- 形状为
(batch size, 1, 28, 28)的小批量数据不断进行卷积与最大池化操作。特征图的维度变化是这样的- 左:
(batch size, 1, 28, 28)—>(batch size, 32, 28, 28)—>(batch size, 32, 14, 14)—>(batch size, 64, 14, 14)—>(batch size, 64, 7, 7)—>(batch size, 64, 7, 7) - 右:
(batch size, 64, 7, 7)—>(batch size, 64, 7, 7)—>(batch size, 64, 14, 14)—>(batch size, 32, 14, 14)—>(batch size, 32, 28, 28)—>(batch size, 1, 28, 28)
- 左:
- 对于卷积、池化、采样的顺序来讲,在下采样的过程中,先是卷积池化,后是下采样,在上采样的过程中,先是上采样,后是卷积池化。这句话其实不算严谨,但是get到意思就好了。
训练部分
net = SimpleUNet() batch_size = 128 loss_fn = nn.MSELoss() num_epoches = 3 # 写文章的时候只让程序跑了一轮 optimizer = optim.Adam(net.parameters(), lr=1e-3) train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True) test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
for epoch in range(num_epoches): for i, (x, y) in enumerate(train_loader): # 数据预处理 x = corrupt(x, torch.rand(x.shape[0])) # 前向传播 y_hat = net(x) loss = loss_fn(y_hat, y) # 反向传播 optimizer.zero_grad() # 清空梯度 loss.backward() # 计算梯度 optimizer.step() # 更新参数 # 打印损失 if i % 10 == 0: print(f"epoch:{epoch}, step:{i}, loss:{loss.item()}")
在这里就放上前几步的训练信息。
| Epoch | Step | Loss |
|---|---|---|
| 0 | 10 | 0.065431 |
| 0 | 20 | 0.038543 |
| \cdots | \cdots | \cdots |
| 2 | 310 | 0.018558 |
| 2 | 320 | 0.013773 |
测试
fig, axes = plt.subplots(3, 4, figsize=(16, 8)) net.train() for x, y in test_loader: noised_img = corrupt(x, ops.rand(x.shape[0])) x = net(noised_img) imgs = torch.concat([noised_img, x, y], dim=0).transpose(0, 2, 3, 1).asnumpy() for ax, img in zip(axes.flatten(), imgs): ax.imshow(img, cmap="gray") ax.axis("off") break
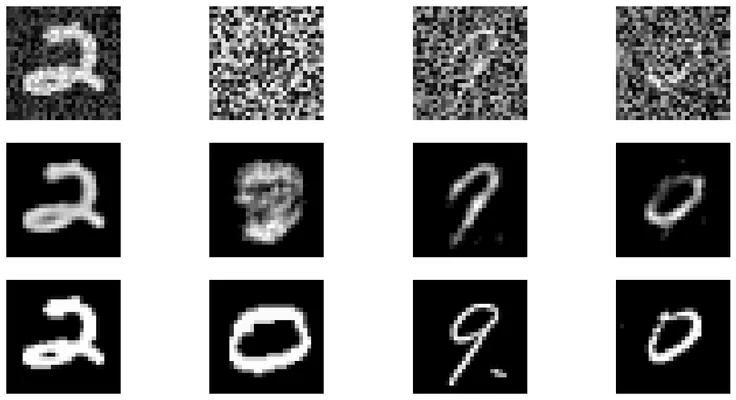
效果还是能打的!
评论区
(0)
U