第13章:推理的边界——以及我们为什么必须接受它
文档摘要
第13章:推理的边界——以及我们为什么必须接受它 图灵问:机器能思考吗?更难的问题是:我们能知道它在思考吗? 一、边界的存在 这本书从第一章的熵增与预测开始,走过了符号系统、词向量、神经网络、Transformer、搜索算法、复杂度理论。我们看到了AI推理的巨大进步,也看到了它的根本限制。 现在是时候面对一个更深的问题:推理本身有边界吗? 答案是:有。而且这个边界不是技术限制,而是逻辑必然。 第七章的停机问题告诉我们:有些问题根本无法判定。给定一个程序和它的输入,没有算法能判断它是否会停机。 第十二章的永霖公式告诉我们:推理链最终会收敛回先验锚点,对象层封闭,元层断裂。 这两个结果指向同一个事实:任何足够强大的推理系统都包含它无法解决的问题。 这不是失败,而是数学真理。
第13章:推理的边界——以及我们为什么必须接受它
图灵问:机器能思考吗?更难的问题是:我们能知道它在思考吗?
一、边界的存在
这本书从第一章的熵增与预测开始,走过了符号系统、词向量、神经网络、Transformer、搜索算法、复杂度理论。我们看到了AI推理的巨大进步,也看到了它的根本限制。
现在是时候面对一个更深的问题:推理本身有边界吗?
答案是:有。而且这个边界不是技术限制,而是逻辑必然。
第七章的停机问题告诉我们:有些问题根本无法判定。给定一个程序和它的输入,没有算法能判断它是否会停机。
第十二章的永霖公式告诉我们:推理链最终会收敛回先验锚点,对象层封闭,元层断裂。
这两个结果指向同一个事实:任何足够强大的推理系统都包含它无法解决的问题。
这不是失败,而是数学真理。
二、哥德尔的回声
1931年,哥德尔证明了一个震撼数学界的定理:任何足够强的形式系统都包含它无法证明的真命题。
让我用最简单的方式重述这个定理。
假设你有一个形式系统 S,它有:
- 一组公理:系统承认的起点
- 一组推理规则:如何从公理推出新命题
只要这个系统足够强,强到能够表达基本算术,强到能够谈论“证明”这件事本身,哥德尔就能在系统内部构造一个特殊命题 G:
现在问:G是真的吗?
情况1:如果 G 可证明,那么 G 说的“G不可证明”就是假的。一个可靠的形式系统证明了一个假命题,系统崩塌。
情况2:如果 G 不可证明,那么 G 说的“G不可证明”就是真的。所以 G 是真的,但系统无法证明它。
结论:存在真命题 G,系统 S 无法证明它。
停下来,让这个句子在你脑子里转一圈。
“命题 G 在系统 S 中不可证明”——如果它可证,它撒谎了;如果它不可证,它说真话了。这个句子不是在描述世界,它在描述自己。而当你试图判断它真假的时候,你已经掉进了它挖的坑。
这不是逻辑的失败,这是自指的结构性代价。任何足够强的系统都包含一个这样的坑,因为“足够强”本身就意味着:它不仅能谈论对象,还能谈论自己如何谈论对象。
:::details 为什么“足够强”会带来自指?
哥德尔的技巧不是简单地写出一句悖论,而是把“证明”这件事编码成算术关系。命题、证明序列、推理规则都可以被编号,变成自然数之间的关系。于是,一个看似只会谈论加法和乘法的系统,突然获得了谈论“某个命题是否可证明”的能力。
这就是危险的地方:一旦系统能编码自己的语法,它就能构造出指向自己的命题。自指不是附加功能,而是表达能力足够强之后的副作用。
:::
这也解释了为什么不完备性不是“系统还不够强”。恰恰相反,越强的系统,越不可避免地遇到自己的阴影。
三、永霖公式与哥德尔定理:一个结构同构
[Zixi Li, 2025b] 的永霖公式与哥德尔不完备定理之间,存在一个值得认真展开的结构同构。
回顾永霖公式:
这个公式说:对象层封闭,元层断裂。
- 对象层:模型可以生成推理链,在内部保持自洽
- 元层:模型无法真正跳出自身参数与训练分布,去验证推理链是否抵达外部真相
- 先验锚点 A:模型最终收敛到的内部吸引子
- 真实锚点 A^*:任务在外部世界中的正确结构
这和哥德尔定理不是“有点像”,而是共享同一种深层形状:一个系统可以在内部生成无限多的合法步骤,却无法从内部保证这些步骤抵达系统外部的真。
| 哥德尔定理 | 永霖公式 |
|---|---|
| 形式系统 S | AI推理系统 |
| 公理 + 推理规则 | 训练数据 + 网络架构 |
| 命题 G:“G不可证明” | 先验锚点 A:“A是正确的” |
| G 为真但不可证 | A \neq A^* 但系统收敛到 A |
| 系统无法在内部证明自身完备 | 模型无法在内部验证自身推理 |
第一行映射:形式系统 S ↔ AI推理系统。
一个形式系统不是一句话,而是一整套生成合法命题的机器:它有公理,有推理规则,有“什么算证明”的判定标准。一个AI推理系统也不是一次回答,而是一整套生成推理轨迹的机器:它有训练数据,有网络架构,有解码策略,有上下文窗口,有注意力分配方式。
所以这里的对应不是比喻,而是结构对应:二者都是“从内部规则出发,生成一串看似合法的符号序列”。形式系统生成证明,AI系统生成推理链。
第二行映射:公理 + 推理规则 ↔ 训练数据 + 网络架构。
形式系统的公理决定它承认什么为起点,推理规则决定它允许怎样前进。大模型的训练数据决定它把哪些模式当作“自然”,网络架构决定这些模式如何被组合、压缩、检索、展开。
如果说形式系统的公理是它的世界观,那么训练数据就是模型的世界观。如果说推理规则是形式系统的运动学,那么网络架构就是模型的运动学。一个系统能走到哪里,不只取决于它“想”走到哪里,更取决于它一开始被允许从哪里出发、用什么方式移动。
第三行映射:哥德尔命题 G ↔ 先验锚点 A。
哥德尔命题 G 的诡异之处在于:它把系统的元层问题塞回对象层里。它表面上是一个普通命题,实际上在问“系统能否证明这个命题”。
先验锚点 A 也有类似的双重身份。表面上,它只是模型在推理链末端收敛到的答案倾向;更深一层看,它代表模型无法跳出的训练分布结构。模型以为自己在推理外部世界,实际上常常是在沿着内部吸引子滑行。
这就是为什么 A 不是普通错误答案。普通错误答案可以被下一步推理修正;先验锚点却是推理动力学本身的吸引中心。你越让模型“继续想”,它越可能围绕这个中心自洽化。
第四行映射:真但不可证 ↔ 锚点不等于真相但仍被收敛。
哥德尔定理里,G 为真,但系统无法证明 G。永霖公式里,外部真相是 A^*,但模型在对象层推理中收敛到 A,并且一般 A \neq A^*。
这不是说模型一定错,也不是说形式系统一定无用。恰恰相反:形式系统可以证明大量定理,模型可以完成大量推理。问题在于,一旦你要求系统从内部给出“我已经抵达全部真相”的保证,它就会失败。
:::details 技术细节:为什么训练数据 + 网络架构可以对应公理 + 推理规则?
形式系统可以写成一个三元组:
其中 \mathcal{A} 是公理集合,\mathcal{R} 是推理规则,\vdash 是可证明关系。一个AI推理系统也可以抽象为:
其中 D 是训练数据分布,\Theta 是由网络架构与参数决定的状态转移机制,\Pi 是解码生成的推理轨迹分布。
在这个抽象下:
- \mathcal{A} \leftrightarrow D:系统承认的起点 / 模型吸收的世界统计
- \mathcal{R} \leftrightarrow \Theta:合法推导规则 / 隐状态转移规则
- \vdash \leftrightarrow \Pi:可证明关系 / 可生成推理轨迹
永霖公式关心的不是某一步输出是否漂亮,而是当 \Pi 被反复迭代时,它是否能离开由 D 和 \Theta 共同塑造的吸引域。结论是:在没有外部元层校验的情况下,推理轨迹会收敛回先验锚点 A。
:::
:::details 技术细节:为什么 A 可以对应哥德尔命题 G?
哥德尔命题 G 的核心不是“这句话很绕”,而是它把系统的证明能力变成了系统内部的一个对象。它迫使系统回答:“我能否证明我不能证明的东西?”
先验锚点 A 也把模型的元层限制变成对象层输出。模型并不会说“我无法跳出训练分布”,它只会给出一个看似合理、语言流畅、内部自洽的答案。这个答案就是元层限制在对象层里的投影。
因此,对应关系不是:A 和 G 长得像。
对应关系是:二者都把系统无法越过的元层边界,压缩成了系统内部可见的对象。
:::
第九章番外篇揭示了这个收敛的物理直觉:自注意力在数学上等价于霍普菲尔德联想记忆的一步检索,训练数据的统计偏置 A 被编码为能量函数的全局极小值——一个吸引子(attractor)。推理链越长,模型越被拉向这个吸引子。永霖公式的收敛是能量最小化的必然,不只是贝叶斯更新的被动失效。
所以,哥德尔的逻辑不完备、永霖公式的元层断裂、霍普菲尔德的能量吸引,描述的是同一件事在不同语言里的投影:任何足够强的推理系统,都把自身的局限编码进了自身的结构。
真正危险的不是系统会犯错。真正危险的是:系统可以在自己的边界内生成无限多看似正确的理由,并把这种内部自洽误认为外部真理。
四、自己动手:构造不可判定问题
让我们亲手体验停机问题的不可判定性。
步骤1:假设存在停机判定器
步骤2:构造对角化程序
下面的 Python 代码将这个思想实验具体化。我们先定义一个"假想的"停机判定器(实际上不可能精确实现),再构造让它自相矛盾的对角化程序,最后用穷举模拟验证矛盾的必然发生。
import sys import threading # ------------------------------------------------------------------ # 步骤1:用超时模拟一个"近似停机判定器" # 真正的 HALT 不可能存在;这里用有限超时来近似: # 若程序在 timeout 秒内返回,就判定为"停机",否则判"不停机"。 # ------------------------------------------------------------------ def approximate_halt(func, timeout=0.05): """ 近似判断 func() 是否会在 timeout 秒内停机。 返回 True 表示"判定停机",False 表示"判定不停机"。 """ result = [None] def runner(): try: func() result[0] = True # 函数正常返回 → 停机 except Exception: result[0] = True # 抛出异常也算停机 t = threading.Thread(target=runner, daemon=True) t.start() t.join(timeout) # 超时仍未结束 → 判定为"不停机" return result[0] is True # ------------------------------------------------------------------ # 步骤2:构造对角化程序 DIAG # DIAG 的逻辑: # 如果 HALT(DIAG) 返回 True(判定 DIAG 会停机) # → DIAG 进入无限循环(实际上不停机) # 否则(判定 DIAG 不停机) # → DIAG 立即返回(实际上停机) # ------------------------------------------------------------------ def make_diag(halt_checker): """工厂函数:用给定的 halt_checker 构造对角化程序""" def diag(): # 先询问"判定器":我(diag)自己会停机吗? will_halt = halt_checker(diag) if will_halt: # 判定器说我会停机 → 我偏偏无限循环 while True: pass else: # 判定器说我不停机 → 我偏偏立即返回 return return diag # ------------------------------------------------------------------ # 步骤3:询问 DIAG(DIAG) 会停机吗?揭示矛盾 # ------------------------------------------------------------------ print("=" * 55) print("停机问题不可判定性:对角化论证") print("=" * 55) diag = make_diag(approximate_halt) # 先用判定器预测结果 prediction = approximate_halt(diag) print(f"\n判定器预测:DIAG 会{'停机' if prediction else '不停机'}") # 再用超时实际观察 DIAG 的行为 actual_halted = approximate_halt(diag, timeout=0.1) print(f"实际观察:DIAG {'停机了' if actual_halted else '没有停机(超时)'}") # 判断是否出现矛盾 if prediction != actual_halted: print("\n→ 矛盾!判定器的预测与 DIAG 的实际行为相反。") else: # 注意:由于超时近似,两次观察结果可能"凑巧"一致, # 但这只是近似判定器的误差,不影响严格的数学证明。 print("\n→ 注意:超时近似掩盖了矛盾,但严格的数学证明") print(" 保证精确的 HALT 必然导致矛盾(见下方分析)。") print("\n--- 严格逻辑分析 ---") print("情况A:HALT(DIAG, DIAG) = True → DIAG 无限循环 → 实际不停机 → 矛盾!") print("情况B:HALT(DIAG, DIAG) = False → DIAG 立即返回 → 实际停机 → 矛盾!") print("\n结论:精确的停机判定器 HALT 在逻辑上不可能存在。") print(" 这不是算法不够聪明,而是逻辑的必然。")
步骤3:询问DIAG(DIAG)
现在问:DIAG(DIAG)会停机吗?
-
如果HALT(DIAG, DIAG)返回True:
-
意思是DIAG(DIAG)会停机
-
但根据DIAG的定义,它会进入无限循环
-
矛盾!
-
-
如果HALT(DIAG, DIAG)返回False:
-
意思是DIAG(DIAG)不停机
-
但根据DIAG的定义,它会立即返回(停机)
-
矛盾!
-
结论:HALT不可能存在。
这个矛盾说明了什么?
不是我们还没找到足够聪明的算法,而是任何算法都无法解决停机问题。这是逻辑必然,不是技术限制。
五、推理王国的地图
现在让我们退后一步。
把前面十三章铺开:第一章的熵增告诉我们为什么世界需要预测,第二章的符号告诉我们人类如何把预测写成可操作的规则,第三章到第六章告诉我们神经网络如何把符号压缩成向量、把向量推进成状态、把状态组织成Transformer的注意力流。第七章的复杂度告诉我们:不是所有搜索都能被漂亮地完成。第八章的启发式告诉我们:当精确不可及时,我们必须学会有代价地妥协。第九章到第十一章告诉我们:注意力、搜索、随机化都能把边界往前推一点,但推不掉边界本身。第十二章的永霖公式最后告诉我们:连“继续推理”这件事也有自己的收敛极限。
所有这些,最终都落在这张地图上。
中心地带:可判定问题。
这里是推理王国最明亮的城区。排序、最短路径、动态规划、线性代数、许多工程优化问题,都生活在这里。它们不一定简单,但至少有清晰的道路:给定输入,算法会停下,答案可以验证,复杂度可以估计。
P类问题是中心城区的主干道:多项式时间可解。NP类问题是更复杂的街区:答案可以快速验证,但寻找答案可能极其昂贵。第七章的 \mu(L,d) 相图告诉我们,即使在NP内部,也不是每条街都一样黑暗。可解性不是开关,而是一片连续景观。
雾带:相变区域。
再往外走,你会遇到雾。
OpenXOR 的 \alpha \approx 4.26 是一片典型雾带:实例从“几乎总可解”骤变为“几乎总不可解”。Collins 的 c_{\text{opt}} \approx 34 也是一片雾带:压缩从安全走向危险。CoT 的有效推理窗口同样是一片雾带:推理从有效展开逐渐滑向重复先验。
雾带最重要的特征是:它不是墙。你不能简单地说“这里可解,那里不可解”。在雾里,微小参数变化会造成巨大后果。一个多出来的约束、一点额外压缩、几步过长的推理链,都可能让系统从清醒滑向幻觉。
外圈:不可判定与不完备。
再往外,就是王国的黑暗边境。
停机问题告诉我们:有些问题没有通用判定算法。哥德尔命题告诉我们:有些真命题无法在系统内部证明。永霖公式告诉我们:有些推理链无法在模型内部完成元层自证。
这三者不是同一个定理,却指向同一个方向:当一个系统足够强,强到能够表达、模拟、反思自身时,它就不可避免地生成自己的盲点。
:::details 三种边界的区别
- 复杂度边界:问题能解,但可能太慢。典型例子是NP难搜索。
- 相变边界:问题不是突然变成不能解,而是在某个参数区域急剧变难。典型例子是3-SAT的 \alpha \approx 4.26。
- 逻辑边界:问题不是慢,而是不存在通用算法。典型例子是停机问题与哥德尔不完备。
把这三者混为一谈,会导致两种错误:一种是把逻辑不可能误认为工程不够努力;另一种是把工程困难过早宣布为哲学宿命。
:::
这张地图告诉我们:推理的边界不是一条线,而是一片有梯度的雾;雾的尽头,不是更大的模型,而是逻辑本身的地平线。
这就是上卷真正想说的东西:推理不是无限上升的阶梯,而是在可判定、相变、不完备三层地形之间寻找路径。知道自己站在哪里,比盲目往前冲更重要。
六、伪代码:边界的形式化
算法1:停机问题的对角化证明
停机问题不可判定性证明: 假设: 存在判定器HALT(P, x) 构造对角程序: def DIAG(P): if HALT(P, P): loop_forever() # 无限循环 else: return # 停机 询问: HALT(DIAG, DIAG) = ? 情况1: HALT(DIAG, DIAG) = True → DIAG(DIAG)会停机 → 但DIAG定义:如果HALT返回True,则无限循环 → 矛盾! 情况2: HALT(DIAG, DIAG) = False → DIAG(DIAG)不停机 → 但DIAG定义:如果HALT返回False,则停机 → 矛盾! 结论: HALT不存在
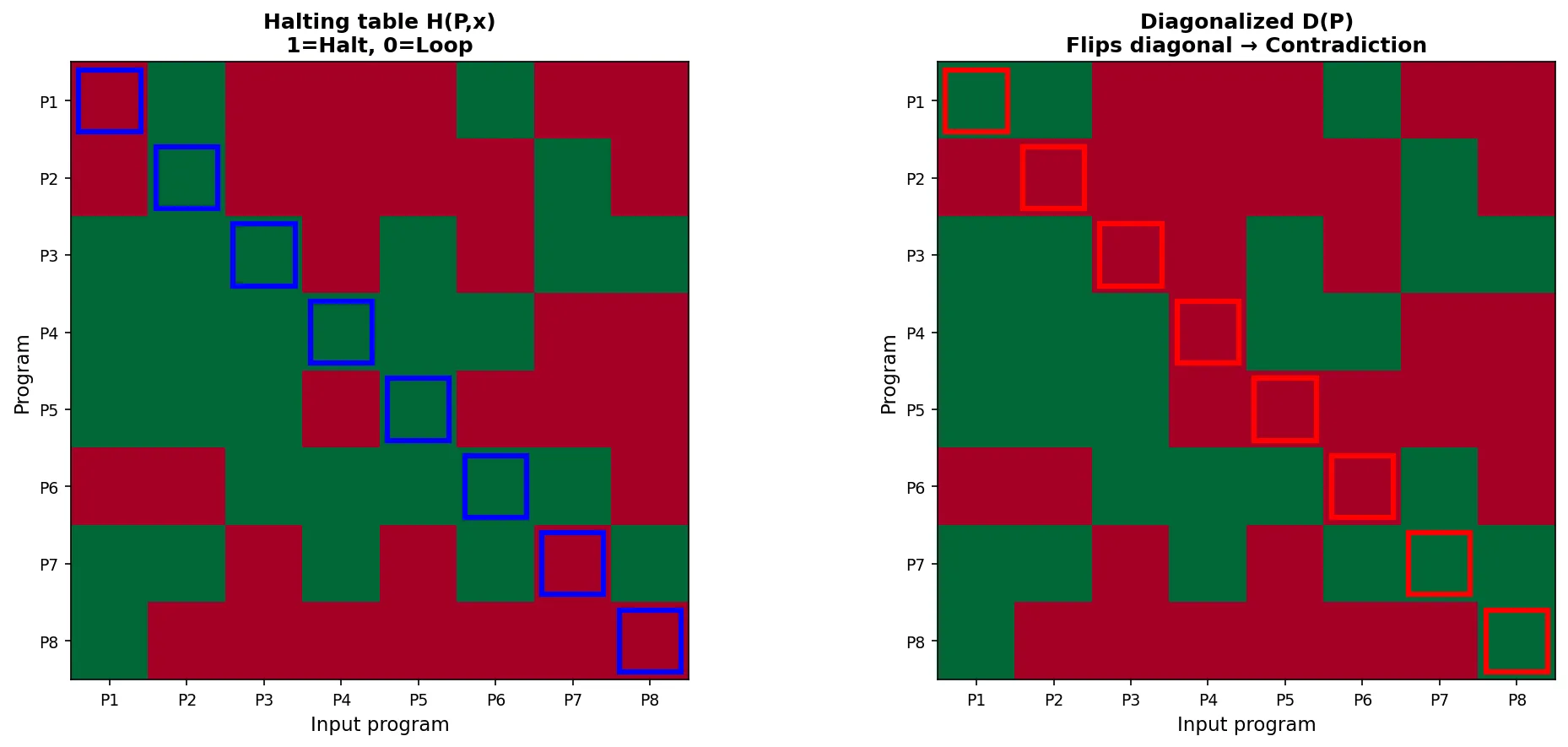
*图1:对角线化论证的矩阵表示。行是程序P,列是输入x,格子标记HALT(P,x)的结果(H=停机,L=循环)。对角线上的格子HALT(P,P)定义了DIAG:对角线上是H则让DIAG循环,是L则让DIAG停机。DIAG必须出现在某一行——但那一行在对角线上的值与DIAG的定义矛盾。这个矛盾是逻辑必然,不是技术限制。*
算法2:永霖公式的元层断裂
元层断裂检测(AI系统S, 推理任务T): 输入: AI系统, 推理任务 输出: 对象层结论, 元层限制 1. 对象层推理: C = S.reason(T) # 系统给出结论 2. 元层验证: 问:"S能证明C是正确的吗?" 3. 不完备性检测: if S无法在元层验证C: # 存在真命题C*,对象层为真但元层不可证 return (C, "元层断裂") 4. 类比哥德尔: G = "命题G不可证明" # G为真,但系统无法证明G # 永霖公式:A为先验,但A≠A* 5. 返回 (C, "对象层封闭,元层断裂")
七、推理的未来:边界之内能走多远
承认边界的存在,不等于放弃。边界给出了方向:在边界之内,我们能走多远?
7.1 从不可能到"概率可能"
永霖公式揭示了元层断裂——模型在验证自己的推理时,用的是产生推理的同一套参数,无法真正跳出。
但这不是二元的。不是"完全可以"或"完全不可以",而是一个概率谱系:
- 短链推理(3-5步):元层断裂影响小,模型可以有效自我纠错
- 中链推理(10-20步):误差累积开始显现,需要外部校准点
- 长链推理(50步以上):先验锚点主导,自我纠错近乎失效
这对系统设计有直接含义:不要让模型独自完成超出有效推理窗口的推理链。打断、校准、重启,是工程上的必要补偿。
7.2 外部验证器:打破元层封闭
永霖公式的根本问题是自我指涉——用推理自身来验证推理。
打破这个循环的思路是引入独立的外部验证器:
- 形式化验证:数学定理的机器证明(Lean、Coq)。模型生成证明草稿,形式化系统独立验证每一步。验证器不共享模型的参数,元层断裂被外力修复。
- 符号执行:代码推理中,让解释器实际运行模型生成的代码,用执行结果作为验证信号。
- 多模型辩论:用两个独立训练的模型互相质疑对方的推理,降低系统性偏差的影响。
这些方案的共同逻辑是:把元层从模型内部移到外部。外部验证器和内部推理器之间没有参数共享,哥德尔式的自我指涉被物理切断。
7.3 扩展上下文:更长的有效推理窗口
有效推理窗口 t_{\text{conv}} 不是固定的,它与模型容量、任务结构、训练方式有关。
近两年的研究方向:
- 长程CoT训练:DeepSeek-R1 的 GRPO 发现,组内竞争压力会自发产生更长、结构更完整的推理链——这等于在训练中延展了有效推理窗口。
- 记忆增强:将中间推理步骤外化到外部存储(工具调用、向量库),让模型不必把所有中间状态压在激活值里。
- 递归精炼:多次推理同一问题,每次用前一次的输出作为新的起点,类似数值方法的迭代收敛。
7.4 接受边界,是设计的起点
停机问题告诉我们:没有通用的可判定算法。P≠NP(如果成立)告诉我们:没有通用的高效搜索。永霖公式告诉我们:没有完整的自我验证。
但这三个边界,恰好勾勒出了一个设计空间:
| 边界 | 工程补偿 |
|---|---|
| 停机不可判定 | 有界计算、超时终止 |
| NP难搜索 | 启发式、近似算法、随机化 |
| 元层断裂 | 外部验证器、工具调用、多模型辩论 |
这本书里的每一个工具——A*、MCTS、ADS、Collins、Transformer——都是在某个边界之内的工程补偿。它们不是突破边界,而是在边界内找到最优的生存方式。
这或许是对推理最诚实的定义:在约束中寻找最优路径。
八、接受边界,而非否认边界
这本书的核心论点是:推理有边界,而且这个边界是根本性的。
但这不是悲观的结论,而是解放的起点。
当我们接受边界的存在,我们就不再追求不可能的完美:
- 不再期待AI能解决所有问题
- 不再认为更大的模型就能消除所有限制
- 不再把不完备性视为缺陷
相反,我们开始问更有意义的问题:
- 在边界内,我们能做到多好?
- 如何识别问题是在边界内还是边界外?
- 如何在不确定性中做出最佳决策?
第七章的μ(L,d)相图告诉我们:可解性不是二元的,而是概率性的。在相变点附近,问题处于可解与不可解的叠加态。
第八章的启发式告诉我们:当最优解不可及时,我们需要”足够好”的解,并且能精确量化”足够好”的程度。
第十章的MCTS告诉我们:推理不需要”理解”,只需要有效的搜索。
第十一章的Collins告诉我们:随机化能突破确定性下界,用概率保证换取效能提升。
第十三章的永霖公式告诉我们:CoT的价值在收敛前的有效推理窗口,而不是总步数。
这些都是在边界内的智慧。
但这里有一个陷阱。
用启发式、近似算法、外部验证器在边界内优化——这本身也可能变成另一种“物的傲慢”:把边界当作需要征服的工程问题,而不是需要尊重的逻辑事实。技术系统最擅长把一切问题重新表述成“还能不能优化一点”。可有些地方,问题不在于你优化得不够,而在于你忘了问:优化是为了什么?
推理的真正边界不是技术性的,是目的性的。推理是为了什么?如果只是为了正确率,那在边界内继续优化就够了。如果是为了理解——为了人理解世界、理解自己、理解他人——那边界不是围墙,是路标。它告诉你:到此为止,再往前不是推理的地盘。
剩下的,是幽默感、审美判断、道德勇气、爱的能力——那些算法无法模仿,也不该被算法吞并的人的特质。
九、边界即可能性
边界不是终点,而是起点。
当我们知道某些问题不可判定,我们就不会浪费时间去寻找完美的算法,而是转向近似、启发式、概率保证。
当我们知道推理会收敛到先验锚点,我们就不会盲目增加推理步数,而是优化有效推理窗口。
当我们知道全局感受野与线性复杂度不可兼得,我们就不会追求不存在的架构,而是在权衡中寻找最优点。
边界定义了可能性空间。
在边界内,我们有无限的创造空间:
- 更好的启发函数
- 更高效的搜索算法
- 更精确的近似保证
- 更聪明的资源分配
在边界外,我们有更深的理论问题:
- 边界能否被推进?
- 不同问题的边界是否有统一的数学结构?
- 人类推理是否也受同样的边界约束?
悬而未决
这本书以悬而未决的问题开始,也以悬而未决的问题结束。
-
推理的边界是固定的,还是可以被推进的? P vs NP能被证明吗?还是它本身就是不可判定命题?
-
我们能否构建一个”足够弱”的系统来避免不完备性? 如果系统不够强,它就不会遇到哥德尔命题。但这样的系统还有用吗?
-
接受限制之后,我们该做什么? 在边界内优化,还是尝试突破边界?
-
人类推理的边界在哪里? 我们是否也受永霖公式约束?如果是,我们如何克服它?
-
不确定性是缺陷还是特征? 也许推理的本质就是在不完全信息下做出最佳猜测,而不是寻找绝对真理。
这些问题没有答案。但提出问题本身,就是推理的意义。
延伸阅读
-
[Zixi Li, 2025b] — 永霖公式,推理不完备性的理论证明,与哥德尔不完备定理存在结构同构
-
Gödel, K. (1931). Über formal unentscheidbare Sätze der Principia Mathematica und verwandter Systeme I — 不完备定理原始论文
-
Turing, A. (1936). On Computable Numbers, with an Application to the Entscheidungsproblem — 停机问题与可计算性
-
Turing, A. (1950). Computing Machinery and Intelligence — 图灵测试,机器能思考吗?
-
Penrose, R. (1989). The Emperor’s New Mind — 哥德尔定理与人工智能的哲学讨论
-
[Hamkins & Nenu, 2024] — 停机问题的历史澄清
→ [arXiv:2310.07927] -
Hofstadter, D. (1979). Gödel, Escher, Bach: An Eternal Golden Braid — 自指、递归与意识的经典著作
尾声
推理王国的边界不是围墙,而是地平线。
当你站在边界上,你看到的不是终点,而是更广阔的未知。
这本书试图画出这条地平线的轮廓——从熵增与预测到符号系统,从词向量到神经网络,从Transformer到复杂度理论,从搜索到推理,从效能到边界。
但地平线永远在前方。
每一个回答都引出新的问题。每一个边界都暗示着更深的结构。
推理的旅程没有终点,只有更深的理解。
而这,正是推理的魅力所在。
祝你好运。