5.1 预测
文档摘要
4.1 预测 无人车是在许多物体间穿梭行驶,其中许多物体本身就是一直在移动的,比如像其他汽车、自行车、行人。无人车需要预测这些物体的行为,这样才能确保做出最佳决策。在环境中为所有其他的物体做出预测,这些共同形成了在一段时间内的预测路径,在每一个时间段内会为每一辆汽车重新计算预测他们新生成的路径,这些预测路径为无人车在规划阶段做出决策提供了必要信息。 预测路径有实时性的要求,实时性是指算法的延迟越短越好,一辆车如果是60千米/小时速度,那么它在每0.25秒会行驶5米,所以需要确保无人车在行驶之前,前方5米没有任何障碍物并且可以安全地穿行。 下一个目标是准确性。如果预测出相邻多车道的汽车想并入我们的车道,我们需要减速。
4.1 预测
无人车是在许多物体间穿梭行驶,其中许多物体本身就是一直在移动的,比如像其他汽车、自行车、行人。无人车需要预测这些物体的行为,这样才能确保做出最佳决策。在环境中为所有其他的物体做出预测,这些共同形成了在一段时间内的预测路径,在每一个时间段内会为每一辆汽车重新计算预测他们新生成的路径,这些预测路径为无人车在规划阶段做出决策提供了必要信息。
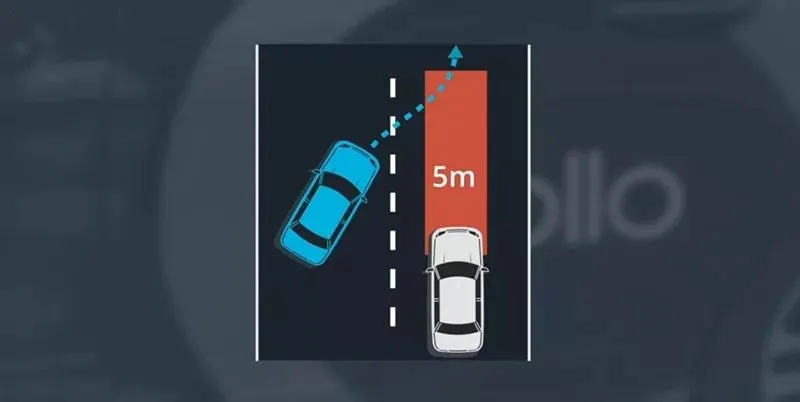
预测路径有实时性的要求,实时性是指算法的延迟越短越好,一辆车如果是60千米/小时速度,那么它在每0.25秒会行驶5米,所以需要确保无人车在行驶之前,前方5米没有任何障碍物并且可以安全地穿行。
下一个目标是准确性。如果预测出相邻多车道的汽车想并入我们的车道,我们需要减速。而另一种情况是如果预测它会保持在自己的车道上行驶,我们需要做出的预测尽可能保持准确,这样才能帮助我们无人车做出很好的决策。
预测模块也应该能够学习新的行为,当路上有很多车辆,情况将变得复杂。开发出每种场景的静态模型是不可能完成的任务,所以预测模块能够学习新的行为,用这种方式可以使用多源的数据进行训练,使算法随着时间的推移而提升预测能力。
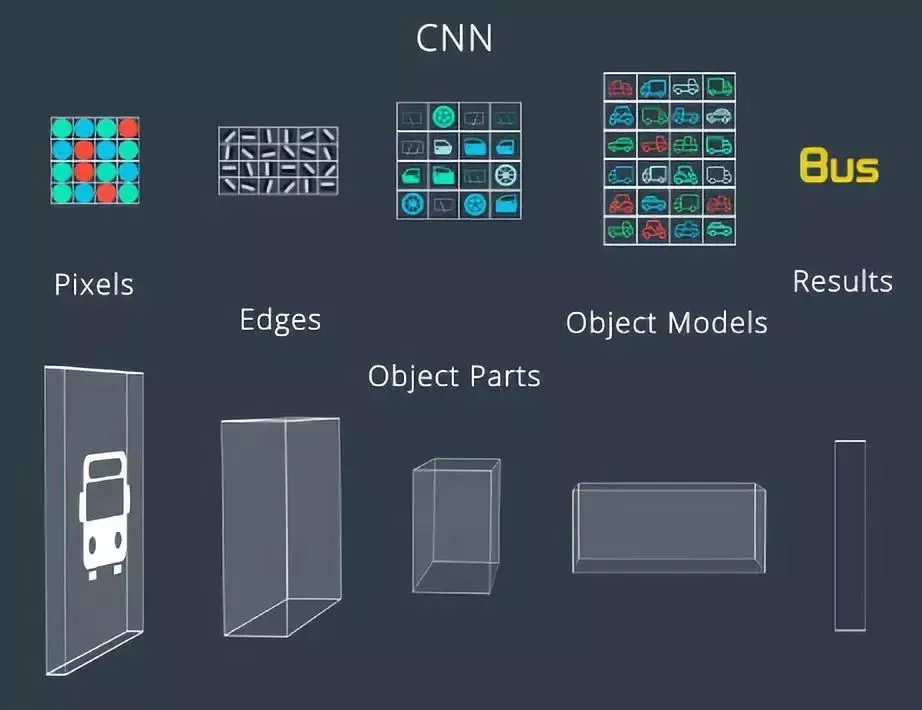
CNN根据其任务查找真正需要的特征,任务可能是图像检测、分类、分割、其他类型的目标。