10.2最大方差视角
文档摘要
10.2 最大方差视角 图10.1给出了一个二维数据集如何使用单个坐标来表示的例子。在图10.1(b)中,我们选择忽略数据的$x2$坐标,因为它没有增加太多信息,所以压缩后的数据与图10.1(a)中的原始数据相似。我们也可以选择忽略$x1$坐标,但那样压缩后的数据将与原始数据非常不同,数据中的大量信息将会丢失。 如果我们将数据中的信息量解释为数据集“填充空间”的程度,那么我们可以通过观察数据的散布来描述数据中包含的信息。从第6.4.1节我们知道,方差是数据散布的一个指标,我们可以将PCA推导为一种降维算法,它通过最大化数据低维表示中的方差来尽可能保留信息。图10.4对此进行了说明。 考虑到第10.1节中讨论的设置,我们的目标是找到一个矩阵$B$(见(10.
10.2 最大方差视角
图10.1给出了一个二维数据集如何使用单个坐标来表示的例子。在图10.1(b)中,我们选择忽略数据的x_2坐标,因为它没有增加太多信息,所以压缩后的数据与图10.1(a)中的原始数据相似。我们也可以选择忽略x_1坐标,但那样压缩后的数据将与原始数据非常不同,数据中的大量信息将会丢失。
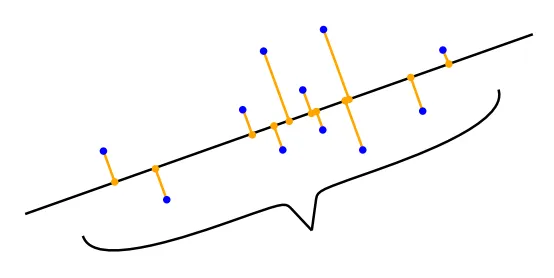
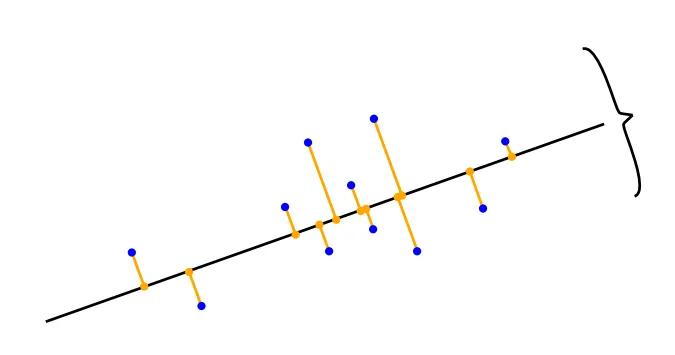
如果我们将数据中的信息量解释为数据集“填充空间”的程度,那么我们可以通过观察数据的散布来描述数据中包含的信息。从第6.4.1节我们知道,方差是数据散布的一个指标,我们可以将PCA推导为一种降维算法,它通过最大化数据低维表示中的方差来尽可能保留信息。图10.4对此进行了说明。
考虑到第10.1节中讨论的设置,我们的目标是找到一个矩阵B(见(10.3)),当通过将数据投影到由B的列b_1, \ldots, b_M张成的子空间上来压缩数据时,该矩阵能够尽可能多地保留信息。在数据压缩后保留大部分信息,等价于在低维编码中捕获最大的方差量(Hotelling, 1933)。
备注。(数据中心化)对于(10.1)中的数据协方差矩阵,我们假设数据已经中心化。我们可以不失一般性地做出这个假设:假设\mu是数据的均值。利用我们在第6.4.4节中讨论的方差的性质,我们得到
(10.6)
即,低维编码的方差不依赖于数据的均值。因此,在本节的其余部分中,我们不失一般性地假设数据的均值为0。在这个假设下,由于\mathbb{E}_z[z]=\mathbb{E}_x[B^\top x]=B^\top\mathbb{E}_x[x]=\boldsymbol{0},低维编码的均值也为0。
10.2.1 最大方差方向
我们使用顺序方法来最大化低维编码的方差。首先,我们寻找一个单独的向量b_1\in\mathbb{R}^D,该向量能够最大化投影数据的方差,即我们旨在最大化z\in\mathbb{R}^M的第一个坐标z_1的方差,使得
(10.7)
达到最大,其中我们利用了数据的独立同分布(i.i.d.)假设,并将z_{1n}定义为x_n\in\mathbb{R}^D的低维表示\boldsymbol{z}_n\in\mathbb{R}^M的第一个坐标。注意,z_n的第一个分量由下式给出:
(10.8)
即,它是x_n在由b_1张成的一维子空间上的正交投影的坐标(第3.8节)。我们将(10.8)代入(10.7),得到
(10.9a)
(10.9b)
其中S是在(10.1)中定义的数据协方差矩阵。在(10.9a)中,我们使用了两个向量的点积关于其参数是对称的这一事实,即\boldsymbol b_1^\top x_n=x_n^\top\boldsymbol b_1。
注意到,任意增加向量b_1的幅度都会增加V_1,即一个长度为两倍的b_1向量可能导致V_1潜在地增加到四倍。因此,我们将所有解的范数限制为\|\boldsymbol{b}_1\|^2=1,这导致了一个约束优化问题,我们在这个问题中寻求数据变化最大的方向。
在将解空间限制为单位向量的条件下,指向最大方差方向的向量b_1可以通过以下约束优化问题找到:
(10.10)
根据第7.2节,我们得到Lagrangre 函数
(10.11)
来解决这个约束优化问题。\mathfrak{L}关于b_1和\lambda_1的偏导数分别为
(10.12)
分别设置这些偏导数为0,我们得到关系式
(10.13)
(10.14)
通过与特征值分解的定义(第4.4节)进行比较,我们发现b_1是数据协方差矩阵S的一个特征向量,而Lagrangre 乘子\lambda_1则扮演了相应特征值的角色。这个特征向量属性(10.13)允许我们将方差目标(10.10)重写为
(10.15)
即,将数据投影到一维子空间上的方差等于与该子空间所跨越的基向量b_1相关联的特征值。因此,为了最大化低维编码的方差,我们选择数据协方差矩阵中最大特征值所关联的基向量。这个特征向量被称为第一主成分。我们可以通过将坐标z_{1n}映射回数据空间来确定主成分b_1在原始数据空间中的效果/贡献,这给了我们投影后的数据点在原始数据空间中。
(10.16)
备注:尽管\tilde{x}_n是一个D维向量,但它仅需要关于基向量\boldsymbol{b}_1\in \mathbb{R} ^D的一个坐标z_{1n}来表示。
10.2.2 最大方差M维子空间
假设我们已经找到了与最大的m-1个特征值相关联的S的m-1个特征向量,即前m-1个主成分。由于S是对称的,根据谱定理(定理4.15),我们可以使用这些特征向量来构造一个(m-1)维子空间的正交特征基,该子空间位于\mathbb{R}^D中。一般来说,第m个主成分可以通过从数据中减去前m-1个主成分b_1,\ldots,b_{m-1}的影响来找到,从而尝试找到能够压缩剩余信息的主成分。然后我们得到新的数据矩阵
(10.17)
其中X=[x_1,\ldots,x_N]\in\mathbb{R}^{D\times N}包含作为列向量的数据点,而B_{m- 1}: = \sum _{i= 1}^{m- 1}b_{i}b_{i}^{\top }是一个投影矩阵,它将数据投影到由b_{1}, \ldots , b_{m- 1}所跨越的子空间上。备注(符号)。在本章中,我们没有遵循将数据x_1,\ldots,x_N作为数据矩阵的行的惯例,而是将它们定义为X的列。这意味着我们的数据矩阵X是一个D\times N矩阵,而不是传统的N\times D矩阵。我们选择这样做的原因是代数运算可以平滑地进行,而无需转置矩阵或将向量重新定义为左乘矩阵的行向量。
为了找到第m个主成分,我们最大化方差
(10.18)
受约束于\|\boldsymbol{b}_m\|^2=1,其中我们遵循了与(10.9b)中相同的步骤,并将\hat{S}定义为变换数据集\hat{\mathcal{X}}:=\{\hat{\boldsymbol{x}}_1,\ldots,\hat{\boldsymbol{x}}_N\}的数据协方差矩阵。与之前单独查看第一个主成分时一样,我们解决了一个约束优化问题,并发现最优解b_m是\hat{S}的特征向量,该特征向量与\hat{S}的最大特征值相关联。
结果证明,b_m也是S的特征向量。更一般地说,S和\hat{S}的特征向量集是相同的。由于S和\hat{S}都是对称的,我们可以找到特征向量的正交归一基(谱定理4.15),即S和\hat{S}都存在D个不同的特征向量。接下来,我们证明S的每个特征向量都是\hat{S}的特征向量。假设我们已经找到了\hat{S}的特征向量b_1,\ldots,b_{m-1}。考虑\tilde{S}(这里应该是S的笔误)的一个特征向量b_i,即Sb_i=\lambda_i\boldsymbol{b}_i。一般来说,
我们区分两种情况。如果 i\geqslant m,即 b_i 是前 m-1 个主成分之外的特征向量,那么 b_i 与前 m-1 个主成分正交,且 B_{m-1}b_i=\boldsymbol{0}。如果 i<m,即 b_i 是前 m-1 个主成分之一,那么 b_i 是主子空间的基础向量,该子空间是 B_{m-1} 投影的目标。由于 b_1,\ldots,b_{m-1} 是该主子空间的正交归一基(ONB),我们得到 B_{m-1}b_i=b_i。这两种情况可以总结如下:
(10.20)
在 i\geqslant m 的情况下,将 (10.20) 代入 (10.19b),我们得到 \hat{S}\boldsymbol b_i=(\boldsymbol{S}-B_{m-1}S)b_i=Sb_i=\lambda_ib_i,即 b_i 也是 \hat{S} 的特征向量,对应的特征值为 \lambda_i。具体来说,
(10.21)
方程 (10.21) 表明 b_m 不仅是 S 的特征向量,也是 \hat{S} 的特征向量。具体来说,\lambda_m 是 \hat{S} 的最大特征值,并且是 S 的第 m 大特征值,两者都与特征向量 b_m 相关联。
在 i<m 的情况下,将 (10.20) 代入 (10.19b),我们得到
(10.22)
这意味着 b_1,\ldots,b_{m-1} 也是 \hat{S} 的特征向量,但它们与特征值 0 相关联,因此 b_1,\ldots,b_{m-1} 构成了 \hat{S} 的零空间。总的来说,S 的每个特征向量也是 \hat{S} 的特征向量。但是,如果 S 的特征向量是 (m-1) 维主子空间的一部分,那么 \hat{S} 的相关特征值为 0。
利用关系 (10.21) 和 \boldsymbol b_m^\top\boldsymbol b_m=1,数据投影到第 m 个主成分上的方差是
(10.23)
这意味着当数据投影到 M 维子空间时,其方差等于数据协方差矩阵对应特征向量的特征值之和。
例10.2 数字8的特征值
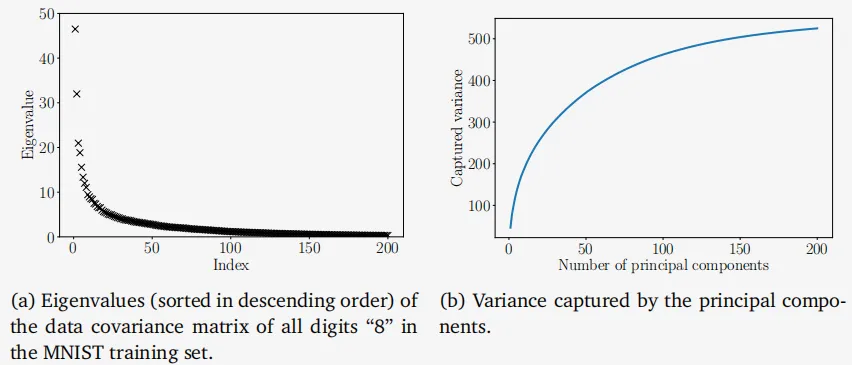
图10.5 MNIST“8”的训练数据的属性。(a)特征值按降序排列;(b)由与最大特征值相关联的主成分捕获的方差。
我们取 MNIST 训练数据中所有的“8”数字,计算数据协方差矩阵的特征值。图 10.5(a) 显示了数据协方差矩阵的 200 个最大特征值。我们看到只有少数几个特征值显著不同于 0。因此,当数据投影到由相应特征向量张成的子空间时,大部分方差仅由少数几个主成分捕获,如图 10.5(b) 所示。
总的来说,为了找到 R^D 中的一个 M 维子空间,该子空间尽可能多地保留信息,PCA 告诉我们选择矩阵 B(在 (10.3) 中)的列作为数据协方差矩阵 S 的 M 个特征向量,这些特征向量与 M 个最大特征值相关联。PCA 用前 M 个主成分可以捕获的最大方差是
(10.24)
其中 \lambda_m 是数据协方差矩阵 S 的 M 个最大特征值。因此,通过 PCA 进行数据压缩时损失的方差是
(10.25)
Instead of these absolute quantities, we can define the relative variance captured as \frac V{M}{V_{D}}, and the relative variance lost by compression as 1-\frac{V_{M}}{V_{D}}.