- 文集信息
- 目录大纲
- 最新文档
- 知识宇宙
文集详情
文集导读
AI硬件与机器人技术教程 ️
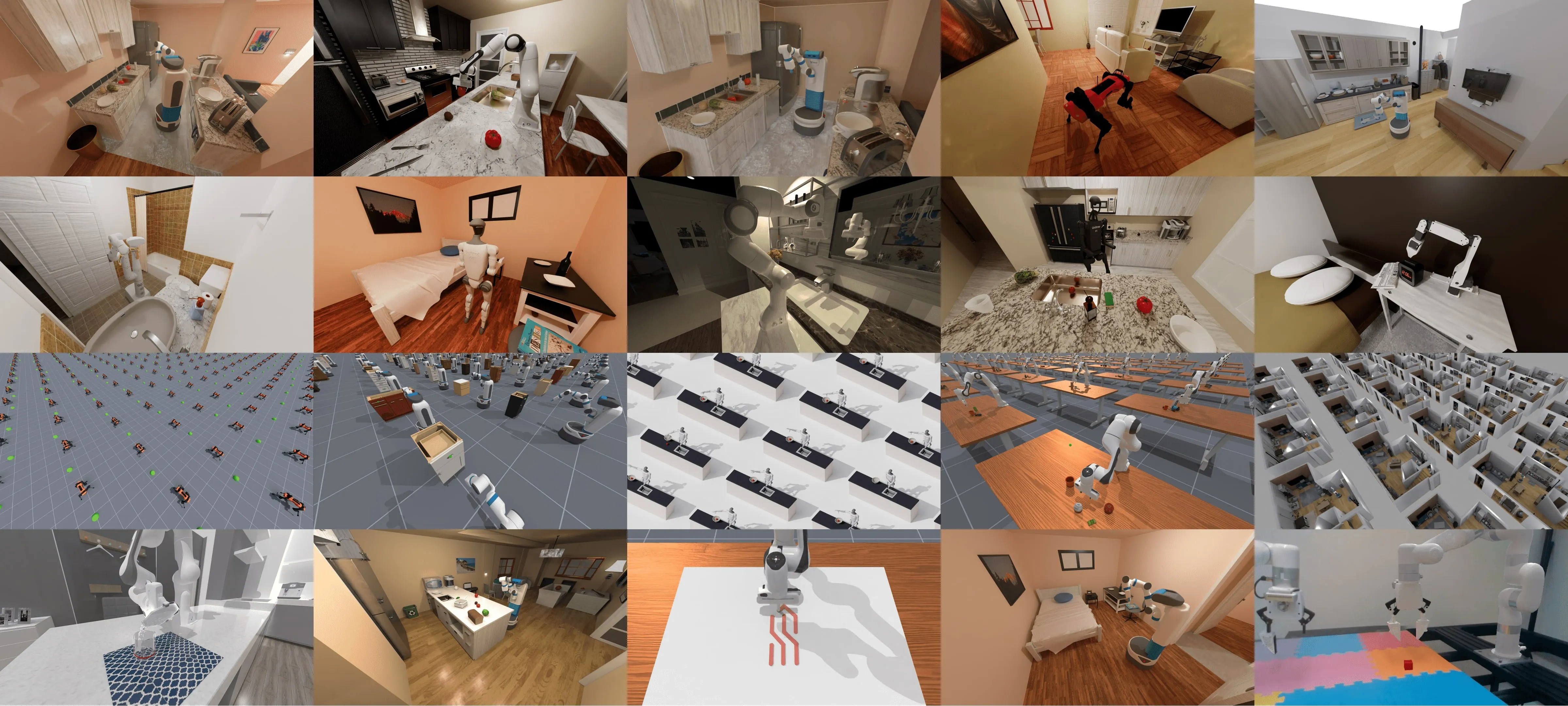
项目简介
本仓库收集整理了AI硬件与机器人技术相关的教程资料,涵盖机器人仿真环境配置、控制算法实现、硬件开发、手眼协调等多个方面。适合机器人技术初学者和研究人员学习参考。
为什么选择本教程?
- 内容全面:从基础到进阶,系统化学习路径
- 实用导向:包含大量实际代码示例和应用案例
- 持续更新:跟踪最新技术发展和应用趋势
- 社区支持:提供交流和问题解答平台
✨ 最新亮点
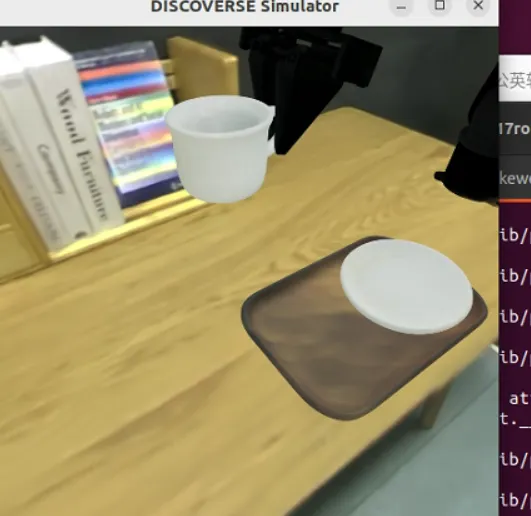
智能家务助手
我们新增的家务机器人模块可实现多项厨房任务,包括:
-
物体识别与抓取(蔬菜、水果、厨具等)
-
环境清理与整理(详细教程待实现)
强化学习框架
全新的强化学习模块支持:
- 多种算法实现(PPO、SAC、TD3等)
- 从模仿到强化的混合学习
- 性能评估与可视化工具
 |
 |
 |
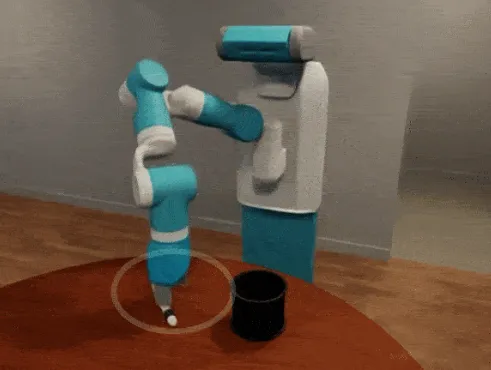
| 机械臂光影渲染 | 取咖啡 | 室内高斯泼溅 |
 |
 |
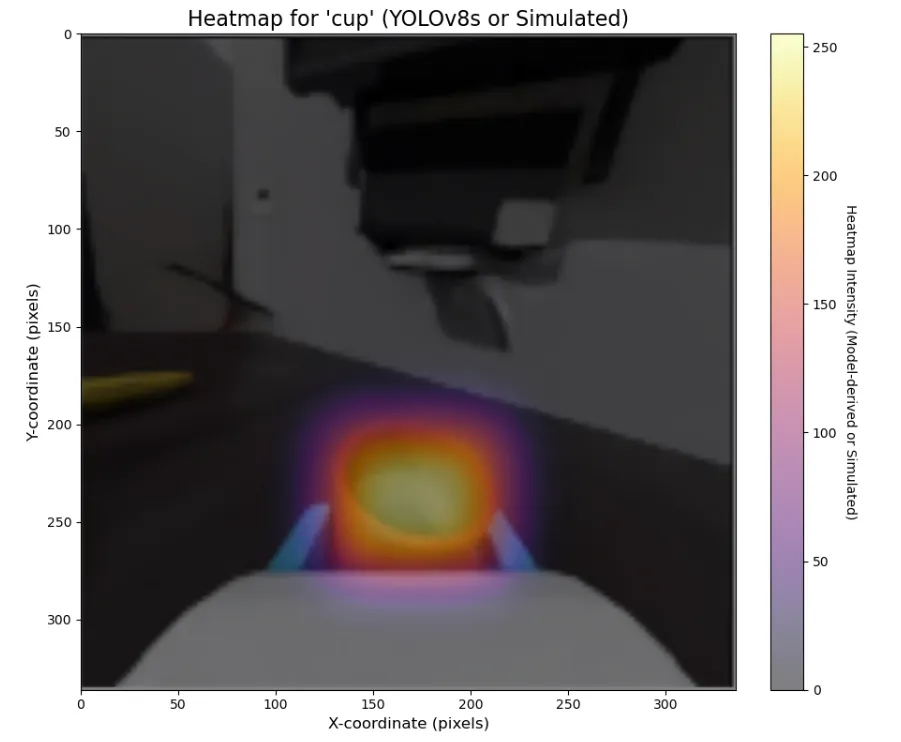 |
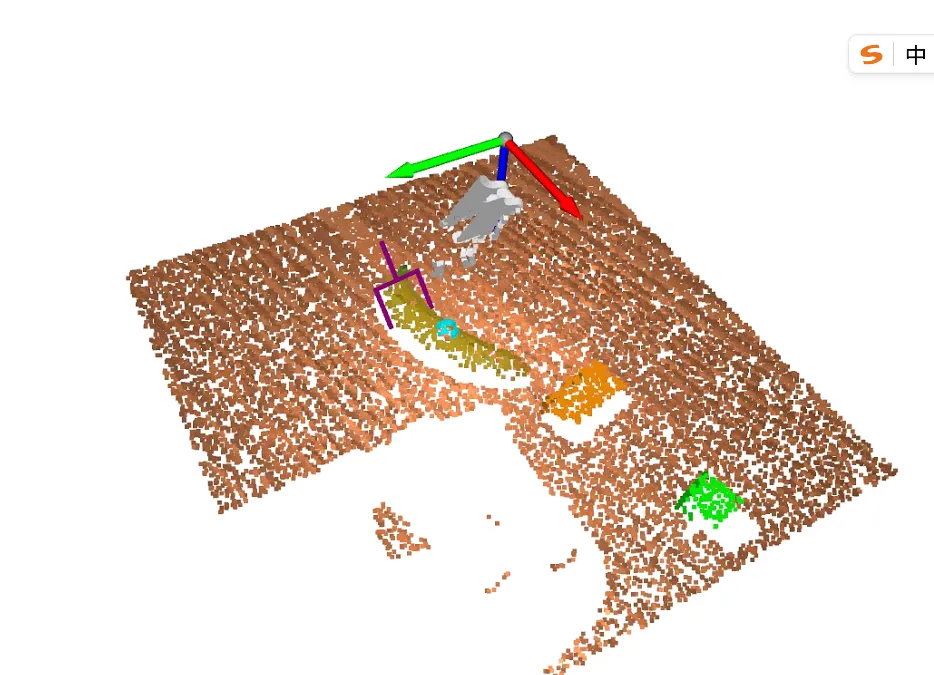
| 室内场景分割 | 机械臂香蕉抓取 | 抓取注意力可视化 |
 |
 |
 |
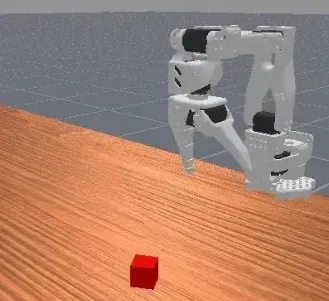
| robotwin1.0复现 | Lerobot仿真支持 | OmniGibson |
 |
 |
 |
| 智元机器人多任务1 | 智元机器人多任务2 | 智元机器人多任务3 |
 |
|
|
| 地瓜RDK-X5连接lerobot-so101进行遥操作 | 智元机器人键盘操作 | 智元机器人轨迹录制 |
学习路径建议
具身智能机器人
- 具身智能概述
-
定义与背景
-
发展历程
-
应用领域
- 机器人基础
-
机器人学基本概念
-
运动学与动力学
-
传感器与执行器
-
机器人硬件选型
-
电路设计(todo)
-
AutoCAD绘图和Solidworks(todo)
-
通信协议(todo)
-
ROS基础(todo)
- 计算机视觉
-
图像处理基础
-
目标检测与识别
-
图像分割
-
位姿估计
- 机器人控制
-
运动规划
-
路径规划
-
控制算法
- 具身场景的深度和强化学习
- 强化学习
- 手眼协调
-
手眼标定
-
抓取与操作
- 仿真环境学习
-
Issac Sim/Issac Gym
-
Pybullet
-
gazebo(todo)
-
Genie-Sim
- 具身智能前沿项目(复现)
-
谷歌具身项目:RT-RT1、RT2、RTX(todo)
-
ReKep
-
BitVLA
-
Aloha-ACT(todo)
-
OpenVLA(todo)
-
Octo(todo)
-
AngGrasp(todo)
-
其他论文复现及代码
环境要求
- Python 3.8+
- CUDA支持(用于3D仿真渲染)
- ROS/ROS2(可选,用于实际机器人控制)
- MuJoCo(物理引擎)
- Isaac Sim(NVIDIA高级仿真平台)
使用方法
每个教程目录下包含独立的说明文档,请参照各自文档进行环境配置和代码运行。
# 克隆仓库 git clone https://github.com/yourusername/ai-hardware-robotics.git cd ai-hardware-robotics # 查看各部分教程 ls 01-机器人仿真/ ls 02-机器人控制/
学习社区
贡献指南
欢迎提交Pull Request贡献更多教程和示例代码!
- Fork本仓库
- 开启一个Pull Request
请确保提交的内容与仓库主题相关,并遵循现有的文件组织结构。
联系方式
有任何问题或建议,请通过以下方式联系我们:
- 微信公众号:datawhale
- 网站:[https://datawhale.club/home]
目录大纲
最新文档
知识宇宙
正在加载知识图谱...